5.3. Die Treiber-Einsprungspunkte
Verwendet eine Applikation einen Systemcall, der eine Interaktion mit einem Gerõt zur Folge hat, wird durch den Betriebssystemkern im Treiber eine korrespondierende Funktion aufgerufen (die so genannten applikationsgetriggerten Treiberfunktionen). Die Namen dieser Treiber-Einsprungspunkte sind zwar frei wõhlbar, wir verwenden aber folgendes Schema: Der Name bildet sich aus dem Namensvorsatz ╗driver½ und dem Namen des zugeh÷rigen Systemcalls (zum Beispiel ╗read½ f³r read). Dies ergibt die folgenden Funktionsnamen:
driver_open
driver_close
driver_read
driver_write
driver_ioctl
driver_poll
Beispiel 5-6. Die Struktur struct file_operations
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*aio_read) (struct kiocb *, char __user *, size_t, loff_t);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*aio_write) (struct kiocb *, const char __user *, size_t, loff_t);
int (*readdir) (struct file *, void *, filldir_t);
unsigned int (*poll) (struct file *, struct poll_table_struct *);
int (*ioctl) (struct inode *, struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, struct dentry *, int datasync);
int (*aio_fsync) (struct kiocb *, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*readv) (struct file *, const struct iovec *, unsigned long, loff_t *);
ssize_t (*writev) (struct file *, const struct iovec *, unsigned long, loff_t *);
ssize_t (*sendfile) (struct file *, loff_t *, size_t, read_actor_t, void __user *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long,
unsigned long, unsigned long, unsigned long);
}; |
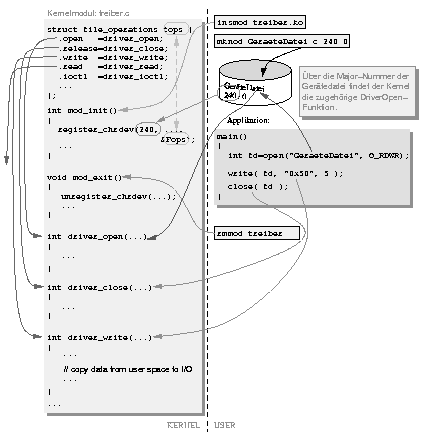
Die Abbildung Einbindung des Gerõtetreibers in das System verdeutlicht noch einmal die dargestellten Komponenten und Ablõufe.
Der Treiber kann nur verwendet werden, wenn im Dateisystem eine Zuordnung zwischen dem symbolischen Gerõtenamen und der Majornumber, die innerhalb des Kernels den Treiber identifiziert, angelegt wurde. Hierzu dient das mknod-Kommando. Au▀erdem muss der Treiber ³berhaupt geladen sein. Dies geschieht ³ber insmod. Beim Laden des Treibers wird zunõchst die Treiber-Funktion init_module aufgerufen. Diese Funktion hat die Aufgabe, das zugeh÷rige Gerõt zu finden und schlie▀lich den Treiber beim System anzumelden (register_chardev).
Anhand des beim open-Call ³bergebenen Dateinamens erkennt das Betriebssystem, ³ber welchen Treiber die Applikation auf ein Gerõt zugreifen m÷chte. Dieser Dateiname stellt im Filesystem die Zuordnung zwischen dem symbolischen Gerõtenamen und der zugeh÷rigen Majornumber her. Der Aufruf des Systemcalls open durch die Applikation f³hrt dazu, dass der Kernel
Speicher f³r eine Datenstruktur vom Typ struct file anlegt, in der unter anderem auch die Flags (z.B. blockierender/nicht blockierender Zugriff oder lesender/schreibender Zugriff) der Applikation abgelegt werden, und
eine open-Funktion des Treibers (hier driver_open genannt) aufruft, der er unter anderem die zuvor initialisierte Datenstruktur struct file ³bergibt.
Die Instanz der Datenstruktur struct file reprõsentiert die zugreifende Applikation und wird im Folgenden mit Treiberinstanz bezeichnet (vergleiche Treiberinstanzen). Eine Treiberinstanz kennzeichnet einen Rechenprozess. Falls der Rechenprozess mehrfach das Gerõt ÷ffnet, umfasst er mehrere Treiberinstanzen.
Die Aufgabe der driver_open-Funktion besteht darin, zu ³berpr³fen, ob die Applikation auf das Gerõt zugreifen darf oder nicht. Darf die Applikation zugreifen, gibt die Treiber-Funktion ╗0½, ansonsten einen sinnvollen Fehlercode zur³ck. Der R³ckgabewert wird der Applikation durch den Betriebssystemkern als Ergebnis des open-Systemcalls ³bergeben.
Konnte das Gerõt ╗ge÷ffnet½ werden, greift die Applikation ³ber den beim ųffnen zur³ckgegebenen Dateideskriptor ³ber die Funktionen read und write zu.
Schlie▀t die Applikation das Gerõt beispielsweise durch Aufruf des Systemcalls close wieder, wird wiederum eine korrespondierende Funktion im Treiber aufgerufen (driver_close). Die Adresse dieser Funktion muss in der Struktur struct file_operations in der Variablen mit Namen release abgelegt werden. Auch wenn ansonsten die Namen der Variablen in dieser Struktur mit den Namen der Funktionen am Applikationsinterface ³bereinstimmen – in diesem Fall wurde eine Ausnahme gemacht.
5.3.1. driver_open: die Zugriffskontrolle
Ruft die Applikation ein open auf, ³berpr³ft der Kernel zunõchst, ob durch den Aufruf dieser Funktion irgendwelche Zugriffsrechte, die mit der Gerõtedatei assoziiert sind, verletzt werden. Ist dies der Fall, teilt der Betriebssystemkern dies der Applikation in Form eines negativen Fehlercodes mit. Ansonsten ruft der Kernel die zugeh÷rige driver_open-Funktion im Treiber auf. Dieser Funktion werden zwei Parameter ³bergeben:
struct file *instanz
struct inode *geraetedatei
Die Struktur struct file *instanz enthõlt sõmtliche Elemente, die die aufrufende Treiberinstanz spezifizieren. Innerhalb des Treibers werden Sie auf diese Struktur zugreifen:
um festzustellen, in welchem Modus der Zugriff erfolgt, ob lesend, schreibend oder lesend und schreibend und
um auszuwerten, ob die Treiberinstanz, also der Rechenprozess, einen blockierenden oder einen nicht blockierenden Zugriff durchf³hrt.
Die Struktur struct inode *geraetedatei enthõlt sõmtliche Elemente, die die zugeh÷rige Gerõtedatei spezifizieren. Dazu geh÷ren die Zugriffsrechte ebenso wie Informationen ³ber den Besitzer (Owner) der Datei. Der hõufigste Grund, auf die Elemente dieser Datenstruktur zuzugreifen, besteht darin, die Major-, aber vor allem auch die Minor-Nummer auszulesen. Hiermit k÷nnen Sie feststellen, ³ber welche Gerõtedatei die Applikation zugreift.
Der Funktion driver_open fõllt die wichtige Aufgabe zu, zu ³berpr³fen, ob die zugreifende Treiberinstanz zum Zugriff berechtigt ist. Die Regeln, ob eine Treiberinstanz legitimiert ist oder nicht, legt der Treiberentwickler fest. Dar³ber hinaus f³hrt die Funktion noch Initialisierungen durch. In Kapitel Treiberinstanzen wird beispielsweise gezeigt, wie die Struktur struct file innerhalb der driver_open-Funktion um instanzenspezifische Parameter erweitert wird.
Nicht jeder Treiber muss driver_open kodieren. Ist keine solche Funktion vorhanden, geht der Kernel davon aus, dass der Zugriff auf den Treiber erlaubt ist. Dies entspricht der Implementierung einer Funktion, bei der bei jedem Aufruf grundsõtzlich der Wert ╗0½ zur³ckgegeben wird:
static int driver_open( struct inode *geraetedatei, struct file *instanz )
{
return 0;
} |
Ein Beispiel soll die Implementierung dedizierter Zugriffsrechte verdeutlichen. So soll ein Treiber realisiert werden, der genau einer Instanz den schreibenden Zugriff, beliebig vielen Treiberinstanzen aber den lesenden Zugriff gestattet. F³r die Realisierung muss der Treiberentwickler wissen, dass im Feld f_flags der Struktur struct file die Zugriffsflags abgelegt sind. Die Zugriffsarten selbst sind im Kernel genauso kodiert wie in der Applikation. Mit diesem Wissen ergibt sich die in Beispiel Dedizierter Zugriffsschutz in driver_open vorgestellte Realisierung der Funktion driver_open.
Beispiel 5-7. Dedizierter Zugriffsschutz in driver_open
static int driver_open( struct inode *geraetedatei, struct file *instanz )
{
if( instanz->f_flags&O_RDWR || instanz->f_flags&O_WRONLY ) {
if( write_count > 0 ) {
return -EBUSY;
}
write_count++;
}
return 0;
} |
In einem zweiten Beispiel soll ein Codefragment vorgestellt werden, welches den Zugriff auf den Treiber ³ber unterschiedliche Gerõtedateien veranschaulicht. Die unterschiedlichen Gerõtedateien sind anhand der Minornumber erkennbar. Die Minornumber wiederum ist in der vom Kernel der Funktion driver_open ³bergebenen Struktur struct inode zu finden. Hier ist es jedoch nicht notwendig, den genauen Feldnamen zu kennen. Vielmehr stellt der Kernel mit iminor eine einfach verwendbare Zugriffsfunktion zur Verf³gung:
static int driver_open( struct inode *geraetedatei, struct file *instanz )
{
if( iminor(geraetedatei)==0 ) {
... // Zugriff ³ber die Gerõtedatei mit der Minor-Nummer 0
} else {
... // Zugriff ³ber alle anderen Gerõtedateien
}
... |
F³r den Zugriff auf die Majornumber existiert ebenfalls eine eigene Funktion: imajor.
5.3.2. Aufrõumen in driver_close
Ruft die Applikation ein close auf, wird treiberseitig die korrespondierende Funktion driver_close angesto▀en, deren Adresse innerhalb der struct file_operations unter dem Namen release abgelegt ist.
Aufgabe von driver_close alias release ist es, die mit der Treiberinstanz assoziierten Ressourcen freizugeben. Fallen jedoch beim Schlie▀en der Gerõtedatei keinerlei Aufgaben f³r den Treiber an – w³rde die Funktion driver_close also nur ╗0½ zur³ckgeben – muss die Funktion nicht kodiert werden.
Im Folgenden soll die zum Beispiel Dedizierter Zugriffsschutz in driver_open passende driver_close-Funktion vorgestellt werden. Da beim driver_open die Anzahl zugreifender Instanzen aufaddiert wird, muss diese bei Aufruf von driver_close wieder nach unten korrigiert werden:
static int driver_close( struct inode *geraetedatei, struct file *instanz )
{
if( instanz->f_flags&O_RDWR || instanz->f_flags&O_WRONLY ) {
write_count--;
}
return 0;
} |
5.3.3. driver_read liefert die Daten
Wird in der Applikation der Systemcall read aufgerufen, f³hrt dies dazu, dass im zugeh÷rigen Treiber ebenfalls eine read-Funktion (driver_read) aktiviert wird. Die in der Applikation ³bergebenen Parameter, nõmlich die Adresse eines Speicherbereiches (Buffer) im User-Space und die maximal zu lesende Anzahl Bytes, werden direkt an den Treiber weitergereicht.
Da das Memory-Management die Speicherbereiche der Applikation und des Kernels voreinander sch³tzt, darf der Treiber auf den von der Applikation ³bergebenen Buffer nicht direkt zugreifen. Der Zugriff erfolgt vielmehr ³ber Funktionen, die im Kapitel Daten zwischen Kernel- und User-Space transferieren ausf³hrlich vorgestellt werden.
Der Prototyp der read-Funktion sieht folgenderma▀en aus:
static ssize_t driver_read( struct file *instanz, char __user *userbuffer, size_t count,
loff_t *offset ) |
Im Treiber lauten die Parameter, die die Applikation bereitgestellt hat, ╗userbuffer½ (Adresse des Speicherbereichs im User-Space) und ╗count½ (maximale Anzahl zu kopierender Bytes).
Der Parameter ╗instanz½ kennzeichnet die zugeh÷rige Treiberinstanz. ▄ber diesen Parameter kann beispielsweise festgestellt werden, auf welches logische Gerõt (erkennbar an der Minornumber) zugegriffen wird und ob der Zugriff blockierend oder nicht blockierend erfolgt.
Der Parameter ╗offset½ ist ein Zeiger auf den Offset, auf den innerhalb des Gerõtes zugegriffen werden soll. Die Applikation beeinflusst diesen Parameter durch den Systemcall lseek. In vielen Fõllen spielt dieser Parameter keine Rolle.
Die driver_read-Funktion hat zur Aufgabe, die vom Gerõt angeforderten Daten in den Speicherbereich der Applikation zu kopieren. Dabei ist darauf zu achten, dass nicht mehr Bytes in den ³bergebenen Buffer kopiert werden, als dieser ³berhaupt zur Verf³gung stellt. Das eigentliche Kopieren wird ³ber eine Funktion (copy_to_user) angesto▀en. Diese Funktion kopiert die Daten nur, falls die Adresse, die die Applikation ³bergeben hat, auf einen g³ltigen (existenten) Speicherbereich zeigt.
Der R³ckgabewert der Funktion copy_to_user ist die Anzahl Bytes, die nicht kopiert werden konnte.
Fordert eine Applikation Daten an, obwohl zum gegenwõrtigen Zeitpunkt keine solchen vorhanden sind, reagiert driver_read abhõngig vom Zugriffsmodus der Treiberinstanz. Greift die Treiberinstanz nicht blockierend zu, wird der Fehlercode ╗-EAGAIN½ (definiert in der Datei <asm/errno.h>) zur³ckgegeben. Befindet sich dagegen die Treiberinstanz im blockierenden Modus, muss die driver_read-Funktion den zugeh÷rigen Rechenprozess (Task oder Thread) in den Zustand schlafend versetzen. Dies wird im Kapitel Zugriffsmodi im Treiber realisieren erlõutert.
Konnten Daten in den Applikationsbereich kopiert werden, wird die Anzahl der kopierten Daten zur³ckgegeben. Sind keine Daten vorhanden, die kopiert werden k÷nnen, wird ╗0½ zur³ckgegeben, was soviel wie End Of File (EOF) bedeutet.
Mit den bisherigen Kenntnissen lassen sich bereits einfache Treiber erstellen. Im Beispiel Hello-World-Treiber stellt der Treiber ein virtuelles Gerõt zur Verf³gung, das bei einem lesenden Aufruf den String ╗Hello World½ zur³ck gibt.
Beispiel 5-8. Hello-World-Treiber
/* vim: set ts=4: */ #include <linux/fs.h> #include <linux/version.h> #include <linux/module.h> #include <linux/init.h> #include <asm/uaccess.h> |

- Diese Header-Datei enthõlt die Prototypen f³r die Funktionen copy_to_user und copy_from_user.

- Hier werden die Daten des virtuellen Gerõtes im Hauptspeicher definiert.

- Rechenprozesse haben uneingeschrõnkten Zugriff auf den Treiber. Daher kann direkt ╗0½ zur³ckgegeben werden.

- In der Read-Funktion wird nur der Lõngenparameter ³berpr³ft und gegebenenfalls angepasst.

- Wie viele Bytes nicht kopiert werden konnten, muss protokolliert werden, damit die richtige Anzahl der Bytes zur³ckgegeben wird, die die Treiberfunktion kopiert hat.

- Hier wird die Anzahl der kopierten Bytes zur³ckgegeben.

- Mit dieser Datenstruktur werden dem Kernel die Einsprungsfunktionen in den Treiber ³bergeben. Wird diese Datenstruktur zu Beginn des Quelltextes definiert, m³ssen die Prototypen der Einsprungsfunktionen vorher angegeben werden. Weil hier die Definition nach den Funktionen erfolgt, werden keine Prototypen ben÷tigt.

- Hier meldet sich das Modul als Treiber beim Kernel an.

- Der Treiber muss sich ordnungsgemõ▀ beim Kernel abmelden.
Um den Treiber testen zu k÷nnen, muss dieser zunõchst generiert werden. Hat der Entwickler ein geeignetes Makefile (siehe Beispiel Makefile zum Hello-World-Treiber) erstellt, reicht der Aufruf von make aus.
Beispiel 5-9. Makefile zum Hello-World-Treiber
ifneq ($(KERNELRELEASE),)
obj-m := hello.o
else
KDIR := /lib/modules/$(shell uname -r)/build
PWD := $(shell pwd)
default:
$(MAKE) -C $(KDIR) SUBDIRS=$(PWD) modules
endif
|
Hei▀t die Quelldatei des Treibers ╗hello.c½, so hei▀t das zu ladende Modul ╗hello.ko½. Der Superuser hat das Recht, das Kommando insmod auszuf³hren.
root# insmod hello.ko root# |
Mit Hilfe des Kommandos lsmod lõsst sich verifizieren, ob das Laden erfolgreich war oder nicht. Konnte das Modul nicht geladen werden, liegt das vielleicht daran, dass bereits ein Treiber geladen ist, der die gleiche Major-Nummer verwendet. Entweder ist dieses bereits geladene Modul zu entladen oder eine andere, freie Majornumber zu verwenden.
Ist der Treiber erfolgreich geladen, kann er ausgetestet werden. Dazu muss der Treiberentwickler, mit Superuser-Rechten ausgestattet, zunõchst die Gerõtedatei anlegen:
root# mknod hellodevice c 240 0 root# |
Die Majornumber muss nat³rlich mit der Majornumber ³bereinstimmen, unter der sich der Treiber beim Kernel angemeldet hat. Da bei dem Hello-World-Treiber die Minornumber nicht ausgewertet wird, kann hier jede beliebige Minornumber verwendet werden.
Damit die Treiberfunktionen getriggert werden k÷nnen, muss eine Applikation auf den Treiber zugreifen. Es ist jedoch nicht zwangslõufig notwendig, eine eigene Applikation zu schreiben, die die Systemcalls open und read aufruft. Vielmehr kann auf Applikationen zur³ckgegriffen werden, die auf jedem Unix-System enthalten sind, wie beispielsweise cat
$ cat hellodevice |
Das Programm cat liest so lange aus der angegebenen Datei, bis es End Of File (0 Bytes gelesen) zur³ckbekommt. Da der Hello-World-Treiber jedoch stõndig die Lõnge des Strings ╗Hello World½ zur³ckgibt, bricht cat nicht von alleine ab. Dies muss der Anwender mit der Tastenkombination ╗CTRL C½ selbst erledigen.
Auch innerhalb der Funktion driver_read kann die Minornumber ausgelesen werden. Der ▄bergabeparameter struct file enthõlt eine Referenz auf die zugeh÷rige Gerõtedatei. Der Zugriff sieht damit folgenderma▀en aus:
static ssize_t minor_read( struct file *instanz, char __user *userbuffer, size_t count,
loff_t *offs )
{
int minor_number = iminor(instanz->f_dentry->d_inode);
... |
5.3.4. Schreibzugriffe im Treiber
Eine Applikation, die Daten ausgeben m÷chte, ruft den Systemcall write auf. Dieser Systemcall triggert die write-Funktion im Treiber, die hier als driver_write bezeichnet wird.
Der Prototyp dieser Funktion sieht folgenderma▀en aus:
static ssize_t driver_write( struct file *instanz, const char __user *userbuffer, size_t count,
loff_t *offs) |
Die Parameter haben die gleiche Bedeutung wie bei der driver_read-Funktion. Der Parameter ╗instanz½ reprõsentiert sowohl die zugreifende Treiberinstanz mit dem logischen Gerõt, welches ³ber die Minornumber identifiziert wird, als auch den Zugriffsmodus (blockierend oder nicht blockierend). Der Parameter ╗userbuffer½ enthõlt die Adresse des Speicherbereichs im User-Space, aus dem die Daten, die geschrieben werden sollen, stammen. Diese Adresse entspricht exakt der Adresse, die in der Applikation beim Aufruf des Systemcalls write angegeben wurde. Beim Parameter ╗count½ handelt es sich um die Anzahl der Bytes, die geschrieben werden sollen. Der Parameter stammt ebenfalls direkt aus der zugreifenden Applikation.
Der Parameter ╗offs½ gibt an, ab welchem Offset innerhalb des Gerõtes (falls ein Gerõt intern mehrere Adressen zur Verf³gung stellt) die Daten abgelegt werden sollen. Dieser Parameter wird von den meisten zeichenorientierten Gerõtetreibern nicht ausgewertet.
Um die Daten aus der Applikation in den Treiber zu bekommen, kann der Treiberentwickler auf die Funktion copy_from_user zur³ckgreifen. Die Funktion ³berpr³ft, ob die von der Applikation ³bergebene Adresse g³ltig ist. Daraufhin kopiert sie die Daten in einen Speicherbereich, den der Treiber angeben kann. Die Funktion copy_from_user gibt die Anzahl der Bytes zur³ck, die nicht kopiert werden konnten. Ist alles gut gegangen, gibt die Funktion also ╗0½ zur³ck.
Die Funktion driver_write selbst gibt – õhnlich wie driver_read – die Anzahl der geschriebenen Bytes zur³ck. Falls keine Daten geschrieben werden konnten, returniert sie ╗0½.
Mit Hilfe dieser Kenntnisse ist das Schreiben eines Codes, der das logische Gerõt /dev/null implementiert, trivial. /dev/null hat die Eigenschaft, alle ³bergebenen Daten ins ╗Nichts½ zu schreiben. F³r eine solche Funktionalitõt muss driver_write allein die Anzahl der zu schreibenden Bytes zur³ckgeben (siehe Beispiel Implementierung des logischen Gerõtes /dev/null).
5.3.5. Die Universalschnittstelle IO-Control
Der Aufruf der Funktion IO-Control bzw. der daraus resultierende Aufruf des zugeh÷rigen Systemcalls triggert die IO-Control-Funktion im Treiber, die von uns driver_ioctl genannt wird.
Die typische Struktur einer driver_ioctl-Funktion ist durch eine Switch-Case-Anweisung gekennzeichnet. Abhõngig vom Kommando, welches der Funktion ioctl durch die Applikation mit ³bergeben wurde, werden die zusõtzlichen Parameter ausgewertet und die zugeh÷rige Aktion im Treiber durchgef³hrt. Auch wenn es gemõ▀ Prototyp m÷glich ist, zu einem IO-Control-Kommando mehrere Parameter zu spezifizieren, ist dies in der Praxis un³blich. Vielmehr wird eine zum Kommando geh÷rige Datenstruktur definiert und der Zeiger auf diese Datenstruktur als Parameter beim Aufruf mit ³bergeben.
Der zum Kommando geh÷rige Parameter ist per definitionem vom Typ unsigned long, so dass innerhalb der Funktion driver_ioctl in vielen Fõllen eine Typwandlung (z.B. per Typecasting) durchgef³hrt werden muss. Beispiel Implementierung einer driver_ioctl-Funkion zeigt die Implementierung im Treiber f³r ein IO-Control IOCTL_BAUDRATE, Beispiel Komplettbeispiel IO-Control zeigt einen vollstõndigen, funktionst³chtigen Treiber.
Beispiel 5-11. Implementierung einer driver_ioctl-Funkion
static int my_ioctl( struct inode *geraetedatei, struct file *instanz,
unsigned int cmd, unsigned long arg )
{
unsigned int baudrate;
switch( cmd ) { |
- Die IO-Control-Kommandos werden im Regelfall ³ber eine Switch-Anweisung differenziert.
- Der Treiberentwickler hat festgelegt, dass das Kommando IOCTL_BAUDRATE genau einen zusõtzlichen Parameter, nõmlich die Baudrate, besitzt. Dieser Parameter ist vom Typ unsigned int. Beim Kopieren des Datums aus dem User-Space in den Kernel-Space mit Hilfe der Funktion copy_from_user wird der Typ von unsigned long auf unsigned int gewandelt.
Im fehlerfreien Fall – das Kommando war g³ltig und konnte erfolgreich ausgef³hrt werden – gibt die Funktion driver_ioctl ╗0½ zur³ck. Ein negativer Wert bedeutet, dass ein Fehler aufgetreten ist.
Die beiden hõufigsten Fehlercodes f³r IO-Control lauten
-EFAULT: das Argument zeigt auf einen ung³ltigen Speicherbereich und
-EINVAL: das Kommando oder der bzw. die zugeh÷rigen Parameter sind falsch.
Beispiel 5-12. Komplettbeispiel IO-Control
#include <linux/fs.h>
#include <linux/module.h>
#include <linux/version.h>
#include <linux/init.h>
#include <asm/uaccess.h>
MODULE_LICENSE("GPL");
#define IOCTL_MAJOR 240
#define IOCTL_GETVALUE 0x0001
static int driver_ioctl( struct inode *inode, struct file *instanz,
unsigned int cmd, unsigned long arg)
{
printk("ioctl called 0x%4.4x %p\n", cmd, (void *)arg );
switch( cmd ) {
case IOCTL_GETVALUE:
copy_to_user( (void *)arg, "Hollahop\n", 10 );
break;
default:
printk("unknown IOCTL 0x%x\n", cmd);
return -EINVAL;
}
return 0;
}
static struct file_operations ioctl_fops = {
.owner= THIS_MODULE,
.ioctl= driver_ioctl,
};
static int __init ioctl_init(void)
{
if(register_chrdev(IOCTL_MAJOR, "ioctl-Driver", &ioctl_fops) == 0) {
return 0;
};
printk("ioctl: unable to get major %d\n",IOCTL_MAJOR);
return -EIO;
}
static void __exit ioctl_exit(void)
{
printk("cleanup_module called\n");
unregister_chrdev(IOCTL_MAJOR,"ioctl-Driver");
}
module_init( ioctl_init );
module_exit( ioctl_exit );
|
Die Kernelentwickler haben ein Schema festgelegt, wie die IO-Control Kommandos kodiert werden sollen. Eine kurze Beschreibung dazu findet sich im Abschnitt Mit Stil programmieren.
5.3.6. Wenn Applikationen mehrere Ein-/Ausgabekanõle ³berwachen
▄ber den poll- bzw. select-Systemcall erhõlt eine Applikation die M÷glichkeit, gleich mehrere Ein- bzw. Ausgabequellen (Dateideskriptoren) auf Verõnderung zu ³berwachen. Damit kann ein Anwenderprogramm mit einem Aufruf ³berpr³fen, ob Daten an einer oder an mehreren Schnittstellen bzw. Gerõten anliegen, so z.B., ob Daten von der Tastatur oder der seriellen Schnittstelle zum Lesen bereitliegen oder ob Daten an die parallele Schnittstelle ausgegeben werden k÷nnen. Diese ▄berwachung findet zudem zeit³berwacht – mit einem im Mikrosekundenbereich einstellbaren Timeout-Wert – statt.
Die vom Treiber zur Verf³gung zu stellende Poll-Funktion hat die Aufgabe, festzustellen, ob Daten mit dem nõchsten Aufruf (read) gelesen und ob Daten mit dem nõchsten Aufruf (write) geschrieben werden k÷nnen. Da die Applikation, die den Poll-Systemcall aufruft, durch das Betriebssystem eventuell schlafen gelegt wird (dann, wenn keines der spezifizierten Gerõte Daten zum Lesen bereithõlt bzw. Daten zum Schreiben entgegennehmen kann), muss das Betriebssystem auch mitbekommen, wenn der Treiber eventuell wieder Daten zur Verf³gung hat. Da das ╗Schlafenlegen½ der Applikation im Regelfall ³ber eine Warteschlange erfolgt, werden dem Betriebssystem alle Warteschlangen bekannt gegeben, ³ber die eine auf Daten von dem zugeh÷rigen Gerõt wartende Applikation aufgeweckt w³rde.
Beispiel 5-13. Die Funktion driver_poll
unsigned int driver_poll( struct file *instanz, poll_table *wait )
{
unsigned int mask = 0;
if( data_avail_to_read ) {
mask |= POLLIN | POLLRDNORM; |
- Wenn f³r den nõchsten Leseaufruf Daten zur Verf³gung stehen, m³ssen die entsprechenden Flags gesetzt werden. Die Bedeutung der Flags ist in Tabelle Die wichtigsten Flags der driver_poll-Funktion erlõutert.
- Wenn Daten auf das Gerõt geschrieben werden k÷nnen, m³ssen die entsprechenden Flags gesetzt werden. Die Bedeutung der Flags ist in Tabelle Die wichtigsten Flags der driver_poll-Funktion erlõutert.
- Dem Kernel wird die Warteschlange mitgeteilt, ³ber die ein Prozess normalerweise aufgeweckt wird, der auf Daten zum Lesen von diesem Gerõt wartet (Funktion poll_wait).
- Dem Kernel wird die Warteschlange mitgeteilt, ³ber die ein Prozess normalerweise aufgeweckt wird, der auf das Gerõt Daten schreiben m÷chte.
Tabelle 5-2. Die wichtigsten Flags der driver_poll-Funktion
Innerhalb der driver_poll-Funktion werden die einzelnen Flags miteinander verodert. Wenn Daten ohne zu blockieren gelesen werden k÷nnen, werden die Flags POLLIN und POLLRDNORM gesetzt; wenn Daten geschrieben werden k÷nnen, die Flags POLLOUT und POLLWRNORM (siehe Die Funktion driver_poll).
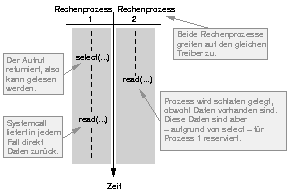
Die Applikationsfunktionen select (siehe Aufruf der Funktion select aus der Applikation) bzw. poll sind derart definiert, dass der dem select bzw. poll folgende read- bzw. write-Aufruf in jedem Fall erfolgreich sein muss, falls der entsprechende Dateideskriptor gesetzt wurde (FD_ISSET == TRUE).
Beispiel 5-14. Aufruf der Funktion select aus der Applikation
select( fdlast+1, &fdsetread, NULL, NULL, NULL ); |
- Der Rechenprozess wird so lange schlafen gelegt, bis f³r einen der Filedeskriptoren, die im Set fdsetread spezifiziert sind, Daten zum Lesen bereitliegen.
- Daten liegen f³r die Treiberinstanz zum Lesen bereit.
- Dieser read-Aufruf muss in jedem Fall sofort bedient werden, ohne dass der zugeh÷rige Rechenprozess schlafen gelegt wird.
Wartet beispielsweise ein Rechenprozess mittels select darauf, dass er Daten lesen kann und signalisiert select schlie▀lich, dass die Daten wirklich gelesen werden k÷nnen, dann muss der folgende Aufruf von read ohne Unterbrechung durch den Treiber durchgef³hrt werden. Und wenn genau nach dem select und vor dem read ein zweiter Rechenprozess lesend auf den Treiber zugreift? Dann wird dieser zweite Rechenprozess so lange schlafen gelegt, bis f³r ihn weitere Daten angekommen sind. Der erste Rechenprozess wird in jedem Fall bedient, sobald er einen read-Systemcall absetzt. Im Treiber muss also in der Poll-Funktion zwischengespeichert werden, dass eine Treiberinstanz Daten lesen darf und der Zugriff f³r andere Rechenprozesse in der Zwischenzeit nicht m÷glich ist.
Eine m÷gliche L÷sung f³r das Problem ist im Beispielprogramm Realisierung einer Poll-Funktion im Treiber vorgestellt. Aus Gr³nden der ▄bersichtlichkeit ist der Code f³r den schreibenden Zugriff weggelassen und nur der Code f³r den lesenden Zugriff dargestellt. Auch ist nur der Kontrollfluss innerhalb des Treibers auskodiert, ein eigentlicher Datenaustausch (z.B. ³ber die Funktion copy_from_user) wird nicht gezeigt. Die driver_write-Funktion wird im Beispiel verwendet, um dem Treiber das Vorhandensein von Daten zu signalisieren. In einem realen Beispiel w³rde diese Funktionalitõt wohl eher in einer Interrupt-Service-Routine zu finden sein.
Beispiel 5-15. Realisierung einer Poll-Funktion im Treiber
/******************************************************************/
/* Das Programm demonstriert eine M÷glichkeit sicherzustellen, */
/* dass nur die Treiberinstanz Daten vom Treiber liest */
/* die auch beim select (poll) die Information bekommen hat, dass */
/* Daten zum Lesen vorhanden sind. */
/******************************************************************/
#include <linux/module.h>
#include <linux/version.h>
#include <linux/init.h>
#include <linux/poll.h>
#include <asm/io.h>
#include <asm/uaccess.h> /* copy_to_user() */
MODULE_LICENSE("GPL");
#define DRIVER_MAJOR 240
static wait_queue_head_t read_queue;
static unsigned long data_avail_for_read = 0; |
- Die Variable data_avail_for_read signalisiert, ob Daten zum Lesen vorhanden sind oder nicht.
- Die Variable reserved_for_proc speichert die Adresse der Treiberinstanz struct file *, die im Fall eines erfolgreichen select-Aufrufs die Daten abholen darf. Wenn mit Ausnahme des Rechenprozesses, der den select-Aufruf durchgef³hrt hat, keine Daten abholbereit sind, muss gewartet werden.
- Wenn eine Applikation Daten per select reserviert, dann aber nicht abholt, werden die Daten f³r andere Rechenprozesse freigegeben, sobald die Applikation beendet ist.
- Hier beginnt die Hauptschleife, in der entschieden wird, ob der zugreifende Prozess in den Zustand ╗wartend½ versetzt wird oder nicht.
Ist das Flag ╗NULL½, bedeutet das nicht, dass generell keine Daten zum Lesen vorhanden sind. Es bedeutet vielmehr, dass nicht jeder x-beliebige Prozess Daten lesen kann.
- F³r die Treiberinstanz, die ein select aufgerufen hat, ist der dem select folgende Lesezugriff erlaubt. Daher kann die Schleife in diesem Fall abgebrochen werden.
- Der eigentliche Datentransfer ist nicht auskodiert.
- Sind Daten zum Lesen vorhanden, muss dies dem aufrufenden Rechenprozess mitgeteilt werden.
- Obwohl Daten zum Lesen vorhanden sind, wird innerhalb des Treibers durch Setzen des Flags der Zugriff gesperrt. Der Zugriff auf die Daten ist nur der Treiberinstanz erlaubt, der das Vorhandensein der Daten soeben signalisiert wurde.
- Diese Treiberinstanz wird hier als zugriffsberechtigt markiert.

- Gemõ▀ der Spezifikation wird dem Betriebssystemkern per Flags mitgeteilt, dass ³ber den fraglichen Filedeskriptor Daten zum Lesen abgeholt werden k÷nnen.
- (11)
- Die driver_write-Funktion dient hier einzig dem Zweck, den Treiber austesten zu k÷nnen. Durch das Schreiben auf den Treiber wird diesem signalisiert, dass Daten zum Lesen vorhanden sind.